Robotics for Microfarms develops open technologies to assist organic, diversified, vegetable farmers.
Tools
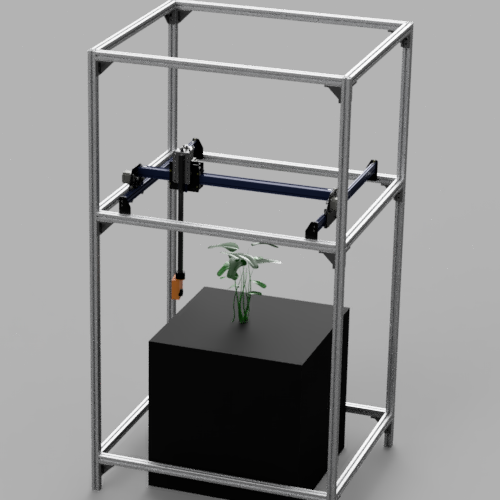
The ROMI Imager performs a full 3D analysis of plants. It combines an imaging station that uses an RGB camera with a powerful image processing pipeline, to build a 3D representation of plants. The plant's constituent organs are detected and this detailed spatial data is available for further analysis.
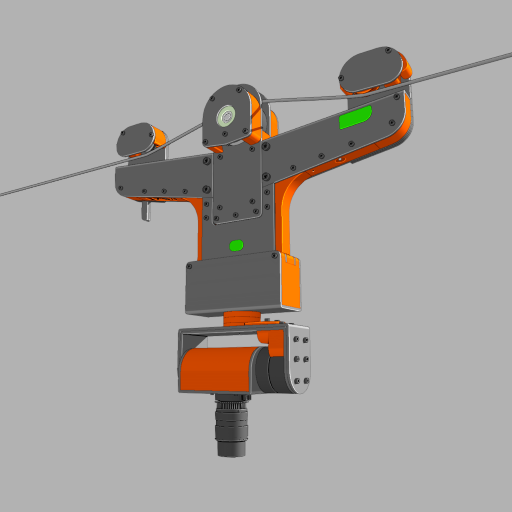
The Farmer's Dashboard and its associated device, the Cablebot, is our primary tool for crop monitoring. With the help of an aerial imaging device, images of the crop are collected and analysed to give the farmer an overview of the status of the crops and also of individual plants.

We designed the ROMI Rover as a farming tool to assist vegetable farmers in maintaining vegetable beds free of weeds. It does this by regularly hoeing the surface of the soil and thus preventing small weeds from taking root. It can do this task mostly autonomously and requires only minor changes to the organization of the farm.
Research

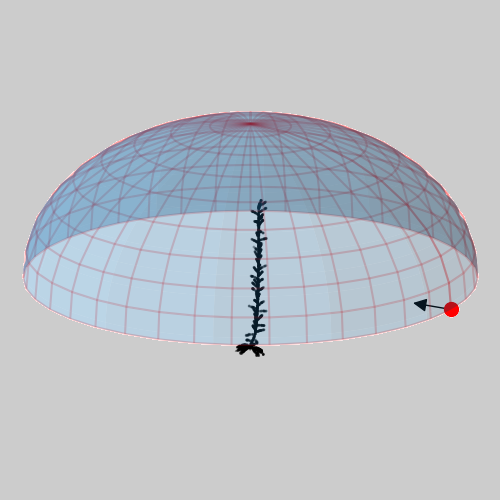
We use virtual plants to train neural networks. This allows us to detect plant organs without the need of collecting and annotating field data.
Farming robots must be able to work in complex and variable environments. For example, plants are complex, time-varying objects. Outdoor fields are very uncontrolled environments, too.
What we do
ROMI is a four-year Europe-funded research project committed to promote a sustainable, local, and human-scale agriculture. It is developing an affordable, multipurpose platform adapted to support organic and polyculture market-garden farms.
The platform constitutes robotic tools, research, data and shared documentation and aims to help farming communities increase their production and improve their working conditions.
Robotic tools
Open-source robotic tools can assist farmers in completing physically demanding or tedious tasks and can help with planning complex planting. Over four years, ROMI will work on the development of three robotic tools: a mechanical weeding robot, an aerial robot for crop monitoring and a 3D scanner for phenotyping in indoor and outdoor environments.
Field studies
Undertaking research directly in the field means ROMI can develop with the expertise of professional farmers. The efficiency and usability of robotic tools are tested across four seasons at two core sites: Chatelain Maraîchage near Paris and at Valldaura Self-sufficiency Labs near Barcelona. Additional community sites may be used for research as the project develops.
Phenotyping and data science
ROMI is working on advanced 3D plant analysis and modelling techniques for indoor and in-field data acquisition. Collecting and analysing data can aid in the development of dashboards that can help monitor the status of farms and provide situated plant data for agronomy. ROMI is working with novel adaptive learning techniques to deal with unexpected situations.
Farming communities
A new generation of farmers are starting small innovative market gardens in rural, peri-urban and urban areas across Europe. These farms often grow polycultures of up to 100 different varieties per year on small surfaces between 0.01 to 5 hectares. Polyculture and organic microfarms are proving to be highly productive, sustainable and economical, yet some of the on-the-ground experiences of farming communities are still unknown. ROMI aims to develop a better understanding of this emerging field through research, events and the development of specialised techniques and tools.