Adaptive systems
We investigate advanced, open-ended learning techniques to gain insight in how farming robots can adapt their image processing capacities when facing plants on which they have not been trained, and insights in how they can learn to optimise the collection of visual information when facing complex plant scenes.
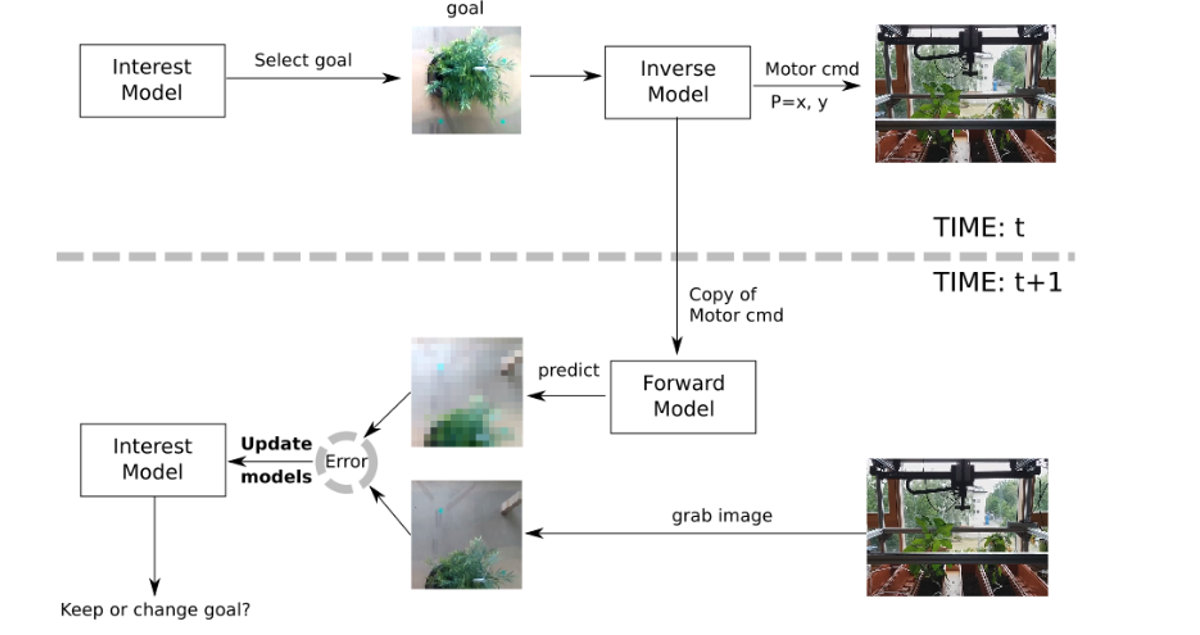
We work on curiosity-driven goal-directed exploration behaviours to move an image sensor around a plant. The artificial curiosity system assigns interest values to pre-defined goals, and drives the exploration towards those that are expected to maximise the learning progress.
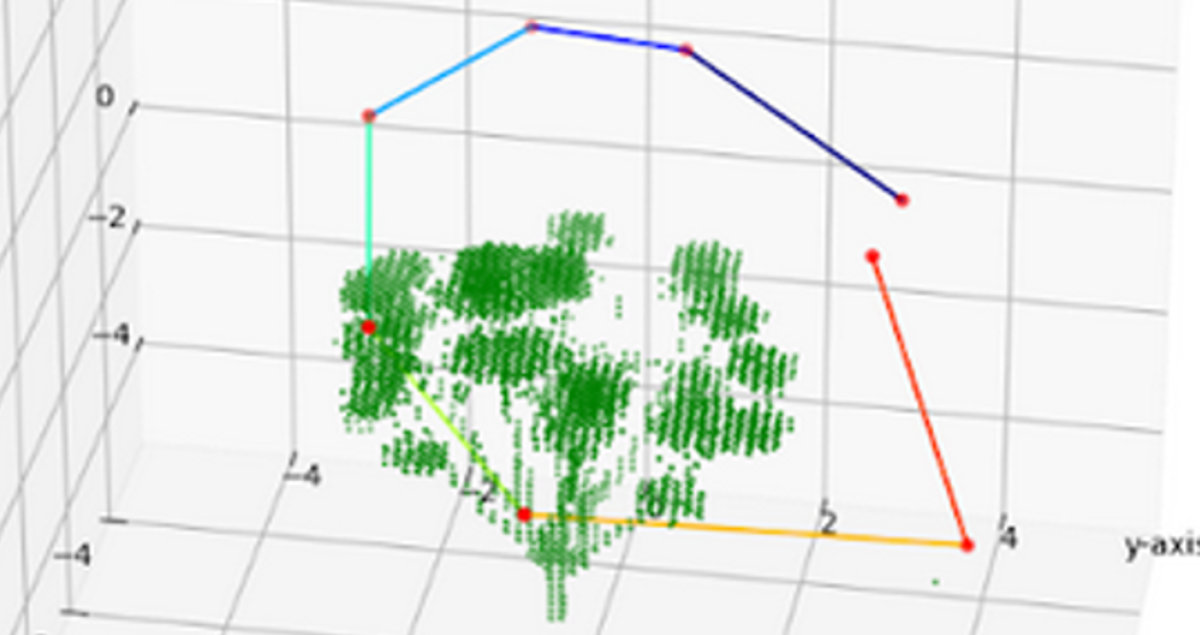
We also train agents to move the camera using Reinforcement Learning. In this technique the agent has to learn how to map situations to actions so as to maximize a numerical reward. The learner is not told which actions to take, but instead has to discover which actions yield the most reward by trying them. In our case, the reward is derived from building an accurate 3D representation of a plant using a small number of images.